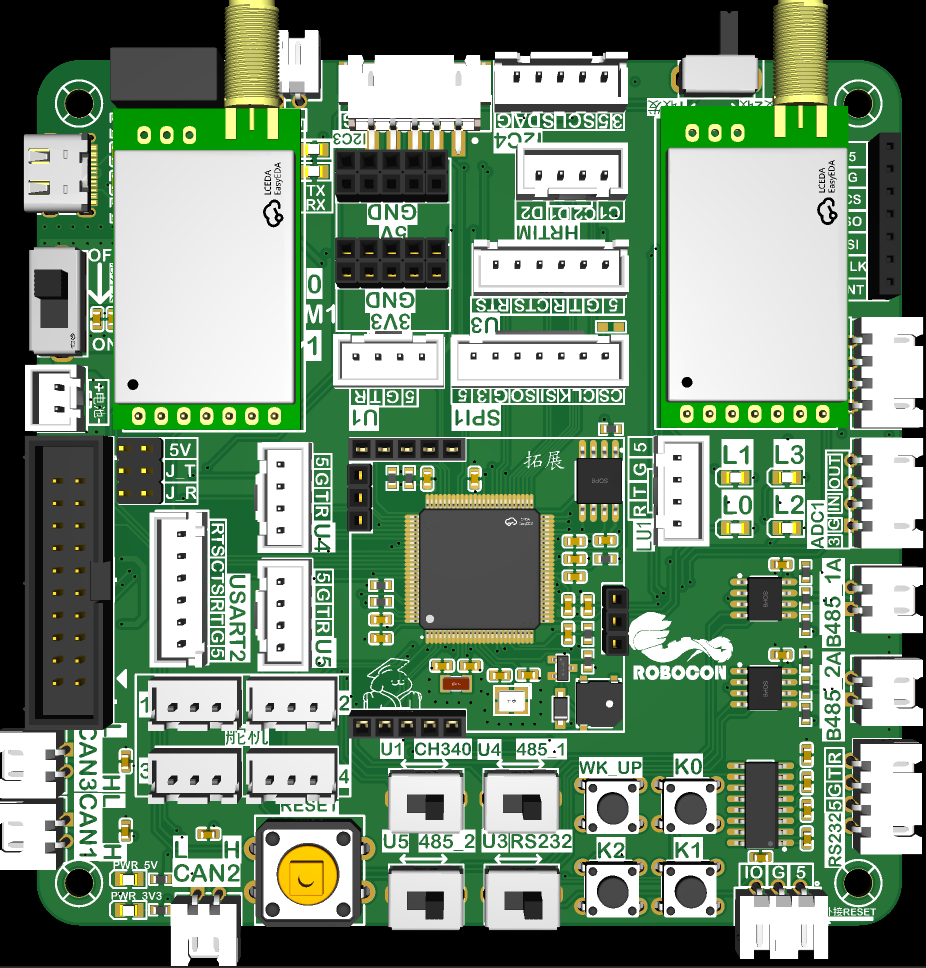
2026G4主控
V2.1
更新内容如下:
1.USB转TTL部分增加了隔离模块,保护小电脑。增加了TX和RX的指示灯。
2.增加了一个控制TYPEC供电的开关,板子通过电池供电时,选择OFF,TYPEC仅传输信号;不接电池时,选择ON,TYPEC既可供电又可传输信号。
3.增加了两个NRF,可通过开关选择收发
4.485_2的使能引脚由普通IO换成硬件流控制的引脚
5.舵机分成3P座子
6.调整CAN的高低顺序,和XHB2.54的线序保持一致
修改引脚
| old | new | ||
|---|---|---|---|
| B0 | ADC3_IN12 | ➜ | GPIO |
| B2 | GPIO | ➜ | ADC2_IN12 |
| B4 | GPIO | ➜ | RS485_2_EN |
| D14 | RS485_2_EN | ➜ | RS485_1_EN |
| D15 | RS485_1_EN | ➜ | GPIO |
V2.0
资源分布
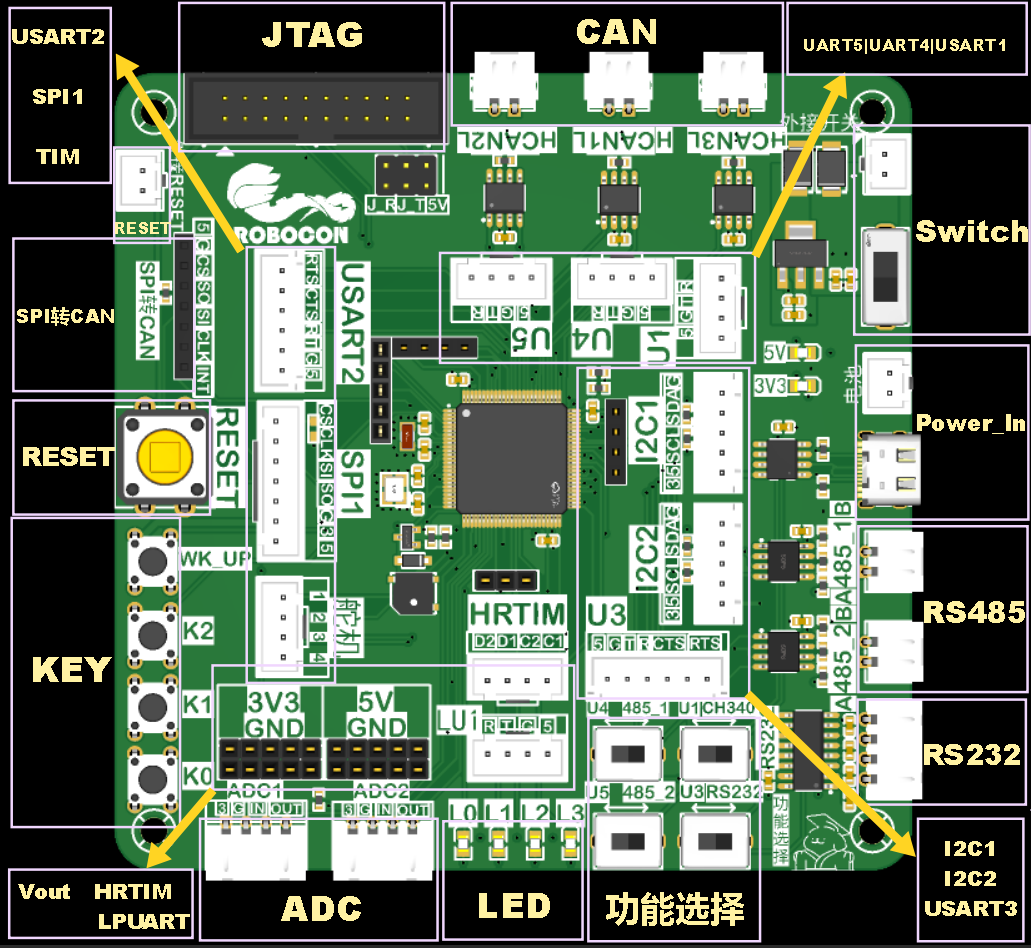
资源分配
| 资源 | 数量 | 说明 |
|---|---|---|
| MCU | 1 | STM32G474VET6 |
| JTAG | 1 | 下载,选接LPUART1 |
| 蜂鸣器 | 1 | 3V3供电无源蜂鸣器 |
| 按键 | 4 | / |
| 电源灯 | 2 | 3V3;5V |
| 状态灯 | 4 | LED0红色、LED1绿色、LED2黄色、LED3蓝色 |
| SPI Flash | 1 | W25Q64 |
| RESET | 2 | 板载、外接 |
| 电源开关 | 2 | 板载、外接 |
| 供电口 | 2 | 5V供电;Type C和XHB2.54 |
| USB转TTL | 1 | CH340N |
| RS232 | 1 | 选接USART3 |
| RS485 | 2 | 485_1选接UART4;485_2选接UART5 |
| I2C | 2 | I2C1(I2C3);I2C2(I2C4) |
| CAN | 3 | CAN1;CAN2;CAN3 |
| SPI | 1 | SPI1加两个片选,SPI1_CS2转CAN |
| ADC | 2 | 控制气泵 |
| 串口 | 6 | LPUART1;USART1;USART2;USART3;UART4;UART5 |
| TIM | 8 | 4个通用定时器通道,4个高分辨率定时器输出 |
| 拓展IO | 16 | / |
| NRF | 2 | / |
引脚分配
| Port | Pin | Function |
|---|---|---|
| A | 0 | WK_UP |
| A | 1 | GPIO |
| A | 2 | BEEP |
| A | 3 | ADC1_IN4 |
| A | 4 | CTRL_1 |
| A | 5 | SPI1_CLK |
| A | 6 | SPI1_MISO |
| A | 7 | SPI1_MOSI |
| A | 8 | FDCAN3_RX |
| A | 9 | USART1_TX |
| A | 10 | USART1_RX |
| A | 11 | GPIO |
| A | 12 | GPIO |
| A | 13 | SWDIO |
| A | 14 | SWCLK |
| A | 15 | FDCAN3_TX |
| B | 0 | ADC3_IN12 |
| B | 1 | CTRL_2 |
| B | 2 | GPIO |
| B | 3 | SWO |
| B | 4 | GPIO |
| B | 5 | FDCAN2_RX |
| B | 6 | FDCAN2_TX |
| B | 7 | GPIO |
| B | 8 | BOOT0-GND |
| B | 9 | GPIO |
| B | 10 | LPUART1_RX |
| B | 11 | LPUART1_TX |
| B | 12 | HRTIM1_CHC1 |
| B | 13 | HRTIM1_CHC2 |
| B | 14 | HRTIM1_CHD1 |
| B | 15 | HRTIM1_CHD2 |
| C | 0 | TIM1_CH1 |
| C | 1 | TIM1_CH2 |
| C | 2 | TIM1_CH3 |
| C | 3 | TIM1_CH4 |
| C | 4 | KEY0 |
| C | 5 | KEY1 |
| C | 6 | I2C4_SCL |
| C | 7 | I2C4_SDA |
| C | 8 | I2C3_SCL |
| C | 9 | I2C3_SDA |
| C | 10 | UART4_TX |
| C | 11 | UART4_RX |
| C | 12 | UART5_TX |
| C | 13 | KEY2 |
| C | 14 | 32.768kHz |
| C | 15 | 32.768kHz |
| D | 0 | FDCAN1_RX |
| D | 1 | FDCAN1_TX |
| D | 2 | UART5_RX |
| D | 3 | USART2_CTS |
| D | 4 | USART2_RTS |
| D | 5 | USART2_TX |
| D | 6 | USART2_RX |
| D | 7 | GPIO |
| D | 8 | USART3_TX |
| D | 9 | USART3_RX |
| D | 10 | GPIO |
| D | 11 | USART3_CTS |
| D | 12 | USART3_RTS |
| D | 13 | GPIO |
| D | 14 | RS485_2_EN |
| D | 15 | RS485_1_EN |
| E | 0 | SPI1_CS1 |
| E | 1 | SPI1_CS2 |
| E | 2 | GPIO |
| E | 3 | INT |
| E | 4 | GPIO |
| E | 5 | GPIO |
| E | 6 | LED0 |
| E | 7 | LED1 |
| E | 8 | LED2 |
| E | 9 | LED3 |
| E | 10 | QUADSPI1_CLK |
| E | 11 | QUADSPI1_BK1_NCS |
| E | 12 | QUADSPI1_BK1_IO0 |
| E | 13 | QUADSPI1_BK1_IO1 |
| E | 14 | QUADSPI1_BK1_IO2 |
| E | 15 | QUADSPI1_BK1_IO3 |
| F | 0 | 25MHz |
| F | 1 | 25MHz |
| F | 2 | GPIO |
| F | 9 | GPIO |
| F | 10 | GPIO |
| G | 10 | RESET |